Project Overview
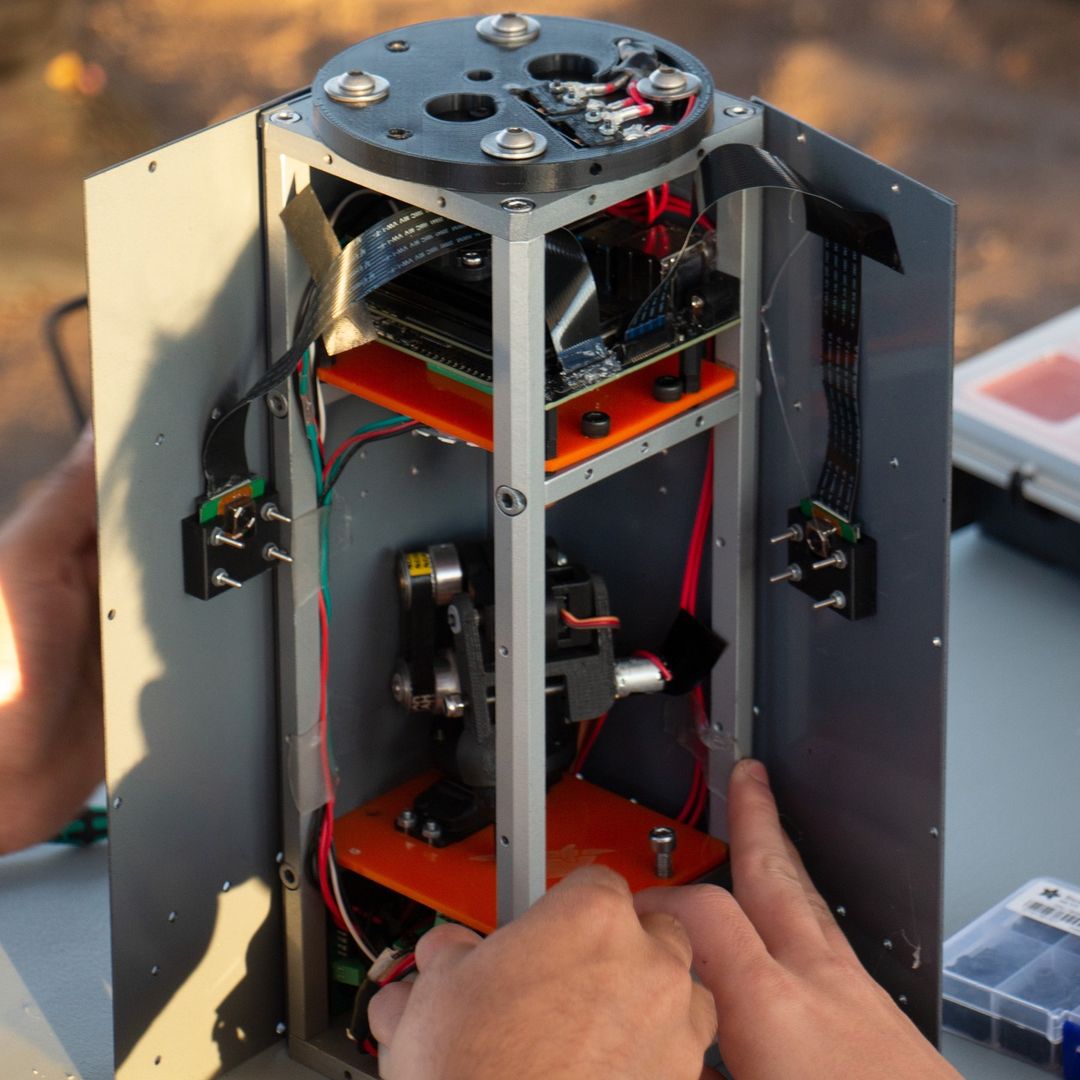
Callistemon consists of a small articulated robot that will track and aim to grab a free-swinging pendulum during the rocket’s descent. This demonstration aim to develop a system that is indicative of space junk capture in satellites, and hopes to show its potential for use beyond just the aerospace industry, with use cases in emergency services, the film industry and even construction.
During the flight of Bluewren at the 2022 Spaceport America Cup, Callistemon functioned as expected, with our computer vision algorithm successfully detecting the pendulum. Our robotic arm was then triggered to detach from its storage position and using the coordinates provided by the arm, it was able to successfully capture the pendulum during landing. Callistemon went on to win the Space Dynamics Laboratory Challenge 2022, with its computer vision algorithm, post-processing and workflow being commended by the judges.
Project Director
Bhavesh “Bobby” Balaji
“Callistemon was the USYD Rocketry Team”s entry into the 2022 SDL Payload Competition where it placed First Place. Callistemon represented the culmination of many the hours of work, iteration, and testing that the team put together. The implementation of computer vision alone in a highly dynamic environment is a point of current research, but combining it with robotics really elevated the difficulty of this project.
Leading the team was an absolute honour as it allowed me to witness the growth of every member with regards to technical knowledge and communication skills. There were many obstacles that had to be overcome during the development of this project, from a tight timeline, space and power constraints, processing limitations, and hardware supply chain issues. Yet the team managed to surpass all expectations and bring home the victory in this international competition with it going up against other high calibre projects.
This project would not have made it this far if it were not for the support of everyone in the team, academics, and Blueprint Lab who”s advice proved incredibly invaluable. This project and resulting victory is a testament to the team’s overarching goal of researching innovative technology and providing practical experience for students to grow into more proficient engineers.”